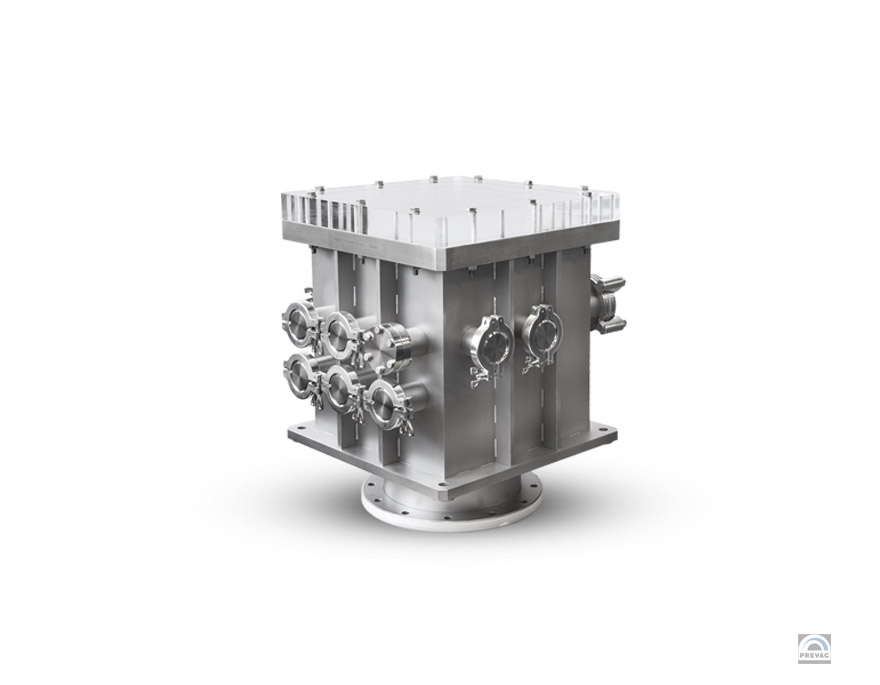

2-5 軸 PLD 目標機械手
2-5 軸電動 PLD 目標機械手專為超高真空條件下的脈沖激光沉積應用而設計。
它是一種高精度、高剛性的 UHV 試樣機械手,帶有多達 6 個靶架的旋轉機構。機械手可以在垂直或水平方向工作,具體取決于 PLD 工藝幾何形狀
描述
目標縱器有兩個旋轉軸:R1 和 R2。通過更改 R1 的位置,可以選擇不同的目標。R2 軸繞其自身的軸連續(xù)旋轉。機械手有一個額外的孔/位置(在兩個目標之間)以容納激光功率計。XY 運動模塊允許通過激光束掃描目標物。一個軸是電動的 – 用于掃描,第二個是手動的 – 用于調整。附加的 Z 軸用于設置通過負載鎖定室傳輸目標物的傳輸位置。Z 機芯可以是電動的或手動的。計算機控制靶材旋轉和在整個靶材直徑(固定激光束)上的徑向掃描,以最大限度地利用靶材進行多層沉積。
▪ 靶材支架: PTS
▪ 基本壓力: 10-10mbar
▪ 可以固定形狀不規(guī)則的目標
▪ 目標尺寸:1 英寸或 2 英寸,標準目標厚度:0.5 – 10 毫米
▪ 目標的連續(xù)單獨旋轉
▪ 目標的選擇
▪和順序變化 防止目標
▪的相互污染 徑向掃描,自動控制
▪ 靶材同軸安裝(相對于基材)并定位,以消除液滴、簇落在基材上的可能性以及可能的目標剝離的影響靶
▪材支架可轉移到負載鎖定室(或儲存室)以快速更換
▪ 水冷系統(tǒng)
技術數(shù)據(jù)
| 標準底座法蘭 | DN 100CF 或 DN 200CF |
| 極限壓力范圍 | 10-10毫巴 |
| 快門 | 集成, 氣動 |
| 冷卻方式 | H20 |
| R2 范圍 | 360° 連續(xù) |
| 位置控制 | 機動* |
| 分辨率(電動) | 0.1° |
| Z 范圍 | 50 mm?(可根據(jù)要求提供其他) |
| 位置控制 | 手輪 |
| 分辨率(手動/電動) | 500 μm / 標準 10 μm(可根據(jù)要求提供 1 μm) |
| XY 范圍(可選) | ± 12.5 毫米 |
| 位置控制 | 千分尺/電動* |
| 分辨率(手動/電動) | 5 微米 / 1 微米 |
| 最大速度 | 高達 50 rpm(可根據(jù)要求提供其他) |
| 烘烤溫度 | 最高 150 °C |
* 步進電機或伺服電機 – 取決于應用。
機械手可以根據(jù)要求為客戶的電機或驅動器準備。